Vision
Education
수강생 프로젝트
의뢰받은 개발
교육형 행사
PinkLAB
/
교육 컨텐츠
/
자율주행 주행로봇 SW
PinkLAB
/
교육 컨텐츠
/
자율주행 주행로봇 SW
Duplicate
Share
Vision
Education
수강생 프로젝트
의뢰받은 개발
교육형 행사
자율주행 주행로봇 SW
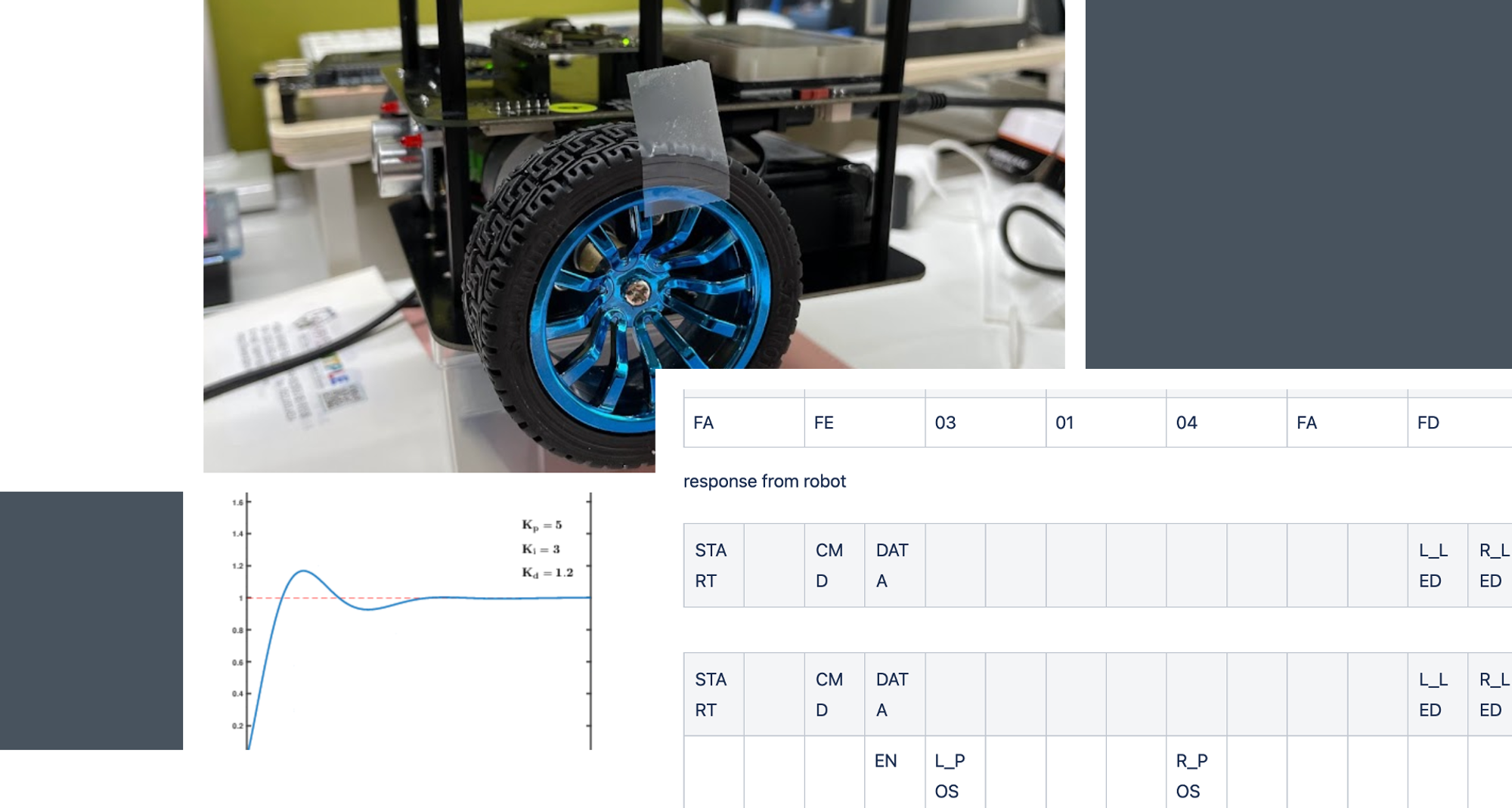
ROS2에서 스스로 자율주행 로봇 SW 패키지를 직접 구현할 수 있도록 노력했습니다. 엔코더 해석, PID 게인 설정부터 ROS2 패키지에서 SLAM과 Navigation 패키지 구성 및 로봇 운용까지를 포함합니다.
FW 레벨에서 PID 제어기 설계 및 상위 레벨과 통신 프로토콜 코드 작성하기
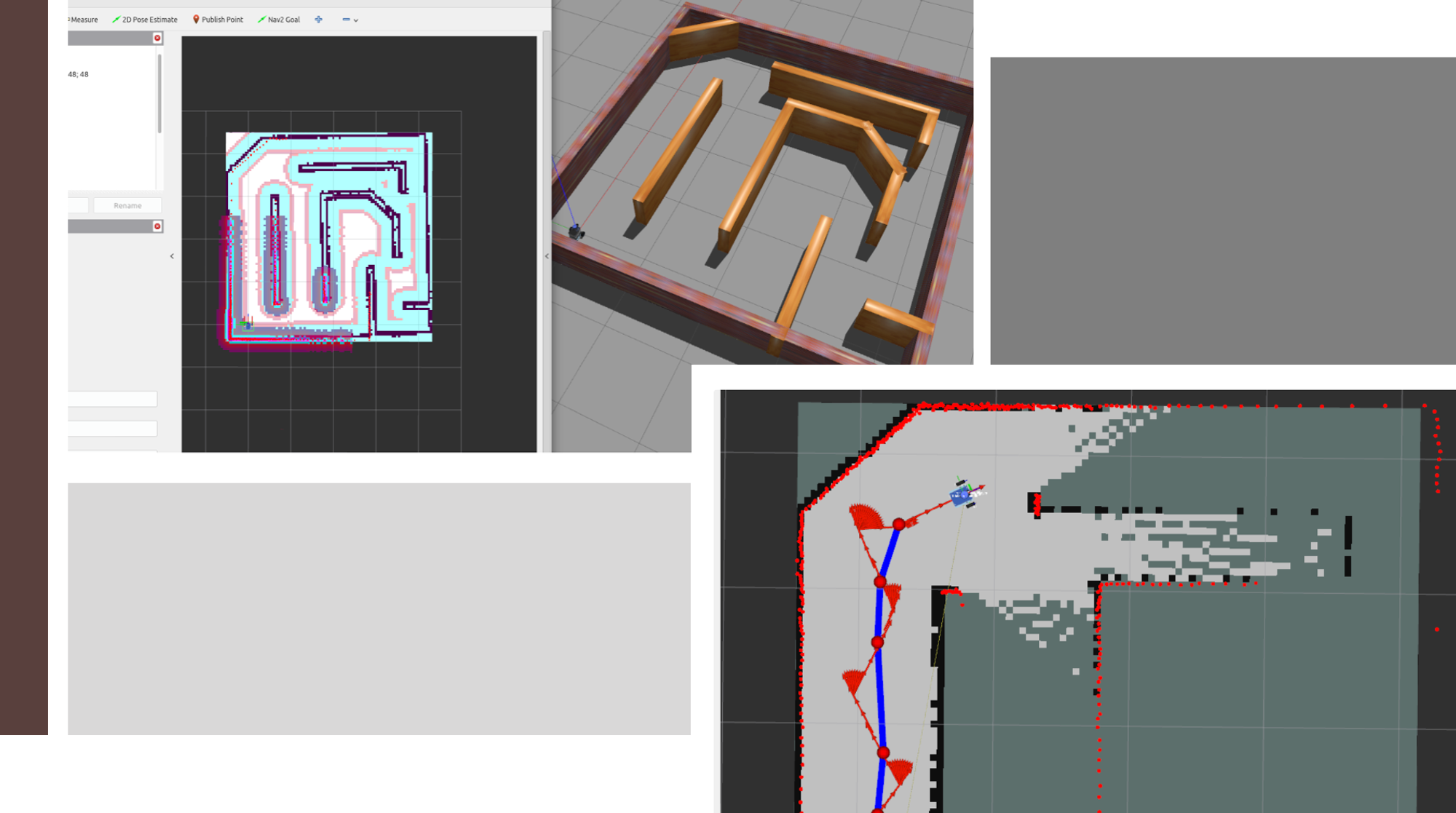
SLAM 및 네비게이션 패키지 구성하기
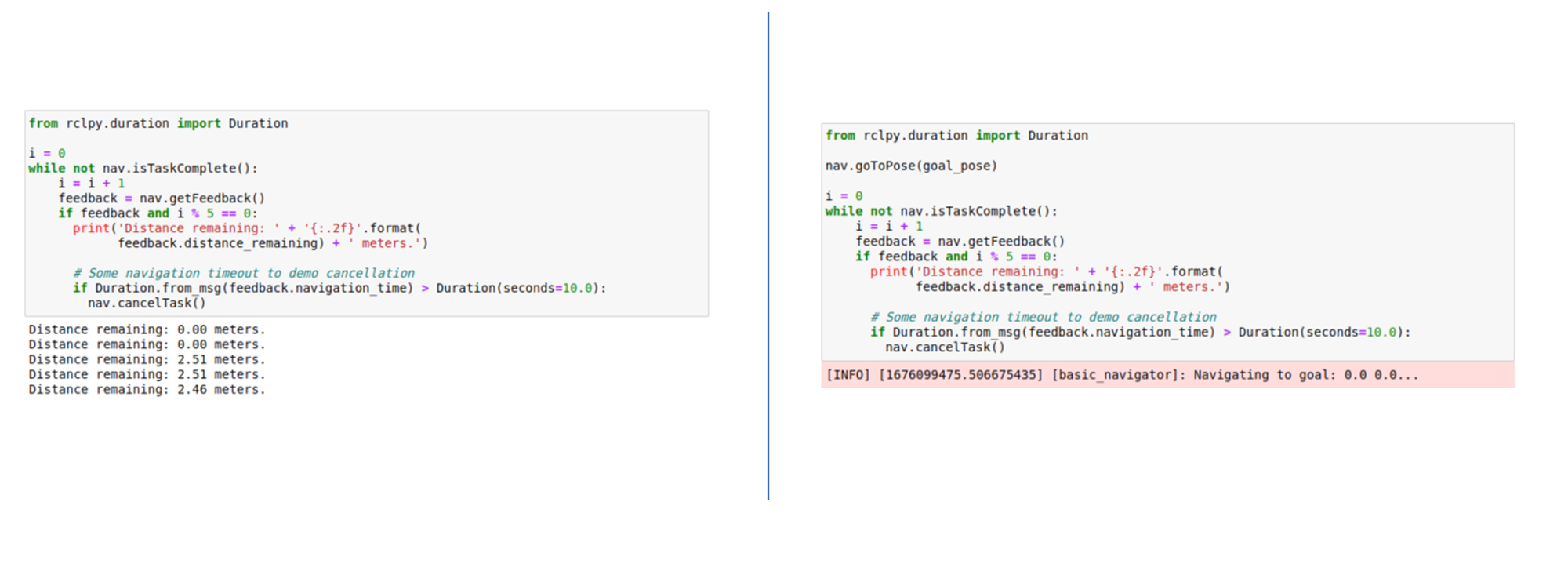
로봇 운용까지