ROS 기초

ROS는 로봇 운영체제 (Robot Operating System) 의 약자로, 로봇 소프트웨어 개발을 위한 프레임워크입니다. ROS는 로봇 프로그래밍에 필요한 다양한 라이브러리, 도구, 기능들을 제공하며, 다양한 로봇에 맞춰진 모듈화된 구조로 설계되어 있습니다.
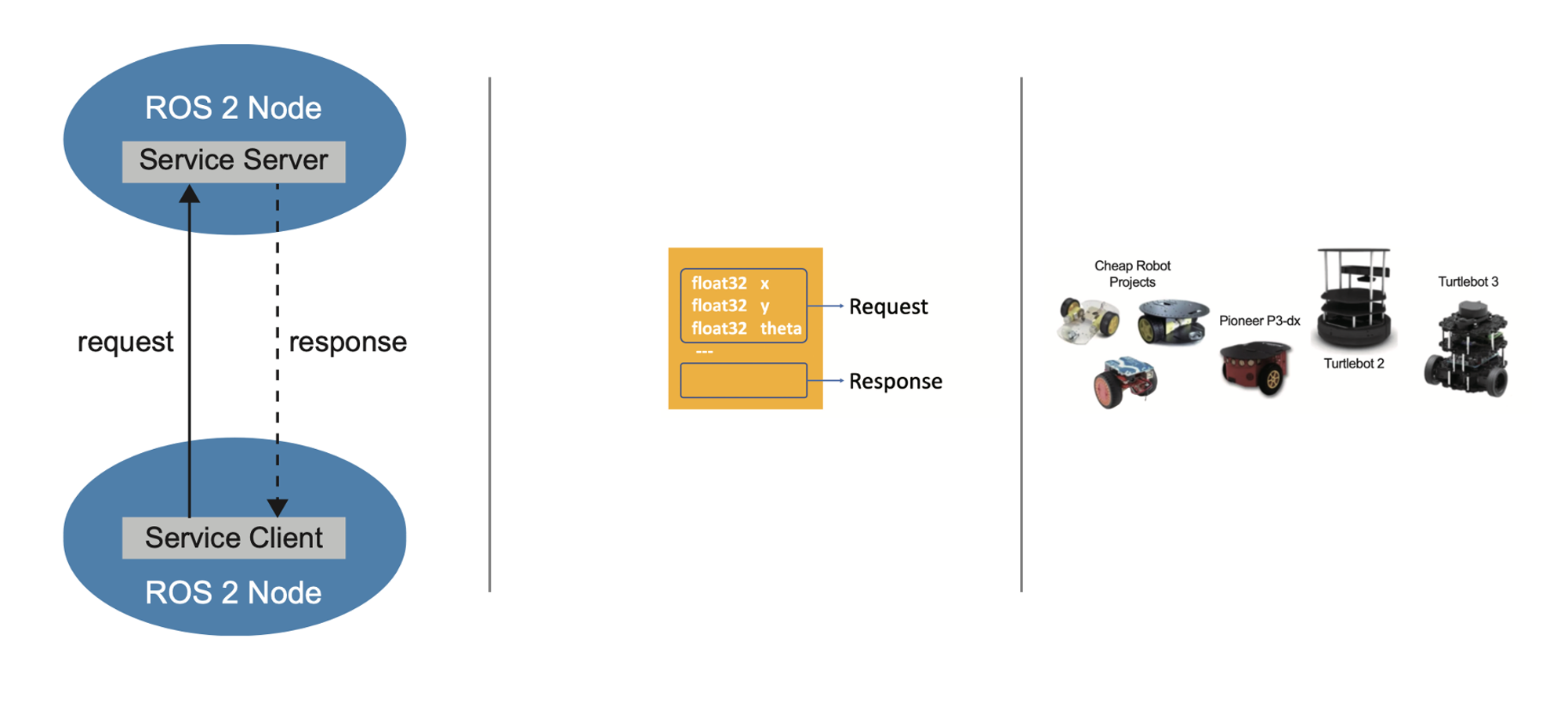
ROS는 C++과 Python 등 다양한 언어를 지원하며, 노드(Node)와 토픽(Topic) 기반의 메시지 통신을 기반으로 합니다. ROS는 간단한 로봇부터 복잡한 로봇까지 다양한 로봇을 지원하며, 로봇 개발을 위한 다양한 도구들을 제공합니다.
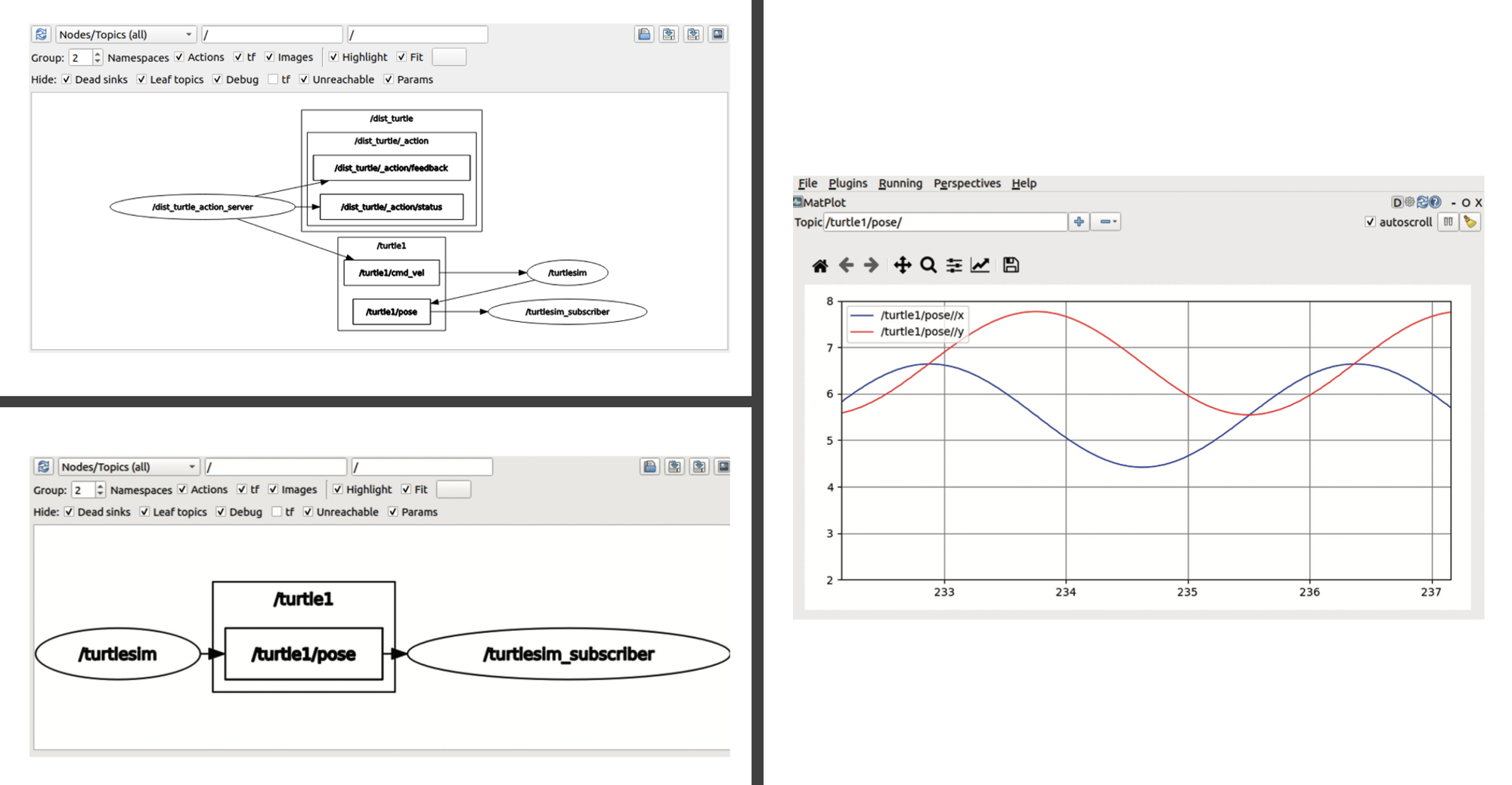
ROS는 로봇 개발자들이 로봇을 제어하고, 센서 데이터를 수집하고, 로봇의 동작을 모니터링하는데 도움을 줍니다. ROS는 로봇 개발을 위한 필수적인 도구 중 하나이며, ROS를 이용하여 로봇 개발을 시작하면 많은 도움이 됩니다.
ROS를 이용하여 로봇을 개발하려면, 우선적으로 ROS를 설치하고, ROS를 이용한 로봇 프로그래밍의 기초를 이해해야 합니다.