핑크랩은 구성원들이 우리의 수업 과정을 이수한 학생들인 경우가 많습니다. 실무 기술, 실무 프로젝트를 실제로 경험하기 위한 목적이 있기 때문입니다. 그렇다고 일을 대충하지는 않습니다. 물론 그럼에도 불구하고, 기술적 깊이에 대해서는 그리 깊은 실력이 있다고 자신있게 말하는 것은 걱정되긴 합니다. 그래도 우리는 우리를 증명하기 위해 열심히 맡겨진 일을 수행합니다.
그런 저희에게 로봇과 딥러닝, 데이터사이언스 관련된 일들이 주어진다면 우리를 위해서, 클라이언트를 위해서 최선을 다해 미션을 수행할 것입니다. 혹시 저희에게 일을 맡기는 것이 걱정되신다면 지금 저희의 실적을 소개할테니, 유사한 난이도의 개발 과제를 외주 개발을 하려고 고민하신 분들은 저희와 대화를 나눠보시죠.
주요 실적
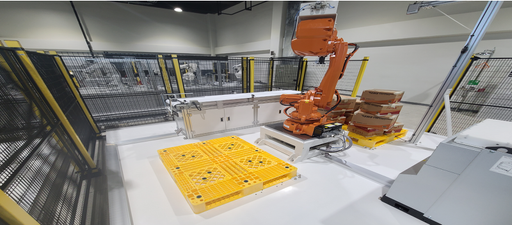
3D 카메라를 이용한 박스 인식 및 박스 위치 계산 - 디팔렛타이징
•
3D 카메라를 이용해서 물체를 인식하고, 인식된 물체의 높이를 측정
•
로봇팔에 물체의 좌표를 전송하고 로봇팔이 쌓여있는 물체를 컨베이어벨트에 정리
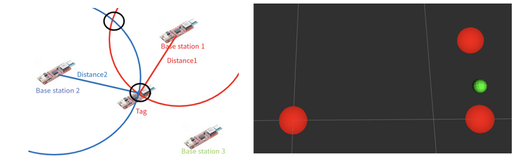
아트센터 나비와 서울대 UX랩에 UWB센서와 ESP32를 이용하는 프로젝트를 수행했습니다.
•
머신러닝적 측면에서 문장을 형태소로 분석하고, 유사한 문장을 검색하는 라이브러리 개발
•
ESP32 보드를 이용하여, 목소리를 PC로 wifi로 전송하는 기술에 대한 학습 자료 개발
•
UWB 센서를 이용하여 공간상에서 위치를 측정하는 기술에 대한 코드 개발 및 학습 컨텐츠 개발.
동영상 내 장면 검색 모델 개발
•
영상에 대한 검색 뿐만 아니라 소리에 대한 검색 기능 개발
•
예를들어 “강아지 소리가 나는 장면이었는데 사람이 도망가던 장면”

자율 주행 골프 캐디봇 요소 기술 개발
•
한 기업의 의뢰를 받아 사람을 추적하는 기능, 홀간 자율주행 기능 등을 탑재한 로봇 기술 개발
핑크랩의 기술을 보여줄 수 있는 주요 키워드
•
아래 링크는 저희 교육의 수강생의 작품을 소개하는 글도 있지만, 이 기술은 또한 핑크랩이 보유하고 있는 기술이기도 합니다.